
021-39529839
电 话:021-39526589-8004
联系人:覃小敏
手 机:19117262520
地 址: 中国 上海 嘉定区嘉涌路99弄6号713
更新时间:2025-04-25 浏览数:7
所属行业:机械设备> 气动元件(机械、工业制品、行业设备)> 气缸
发货地址:德国
产品规格:--
产品数量:100
包装说明:--
单 价:面议
TUNKERS气爪的工作方式V40 BR2 A10 T12 90
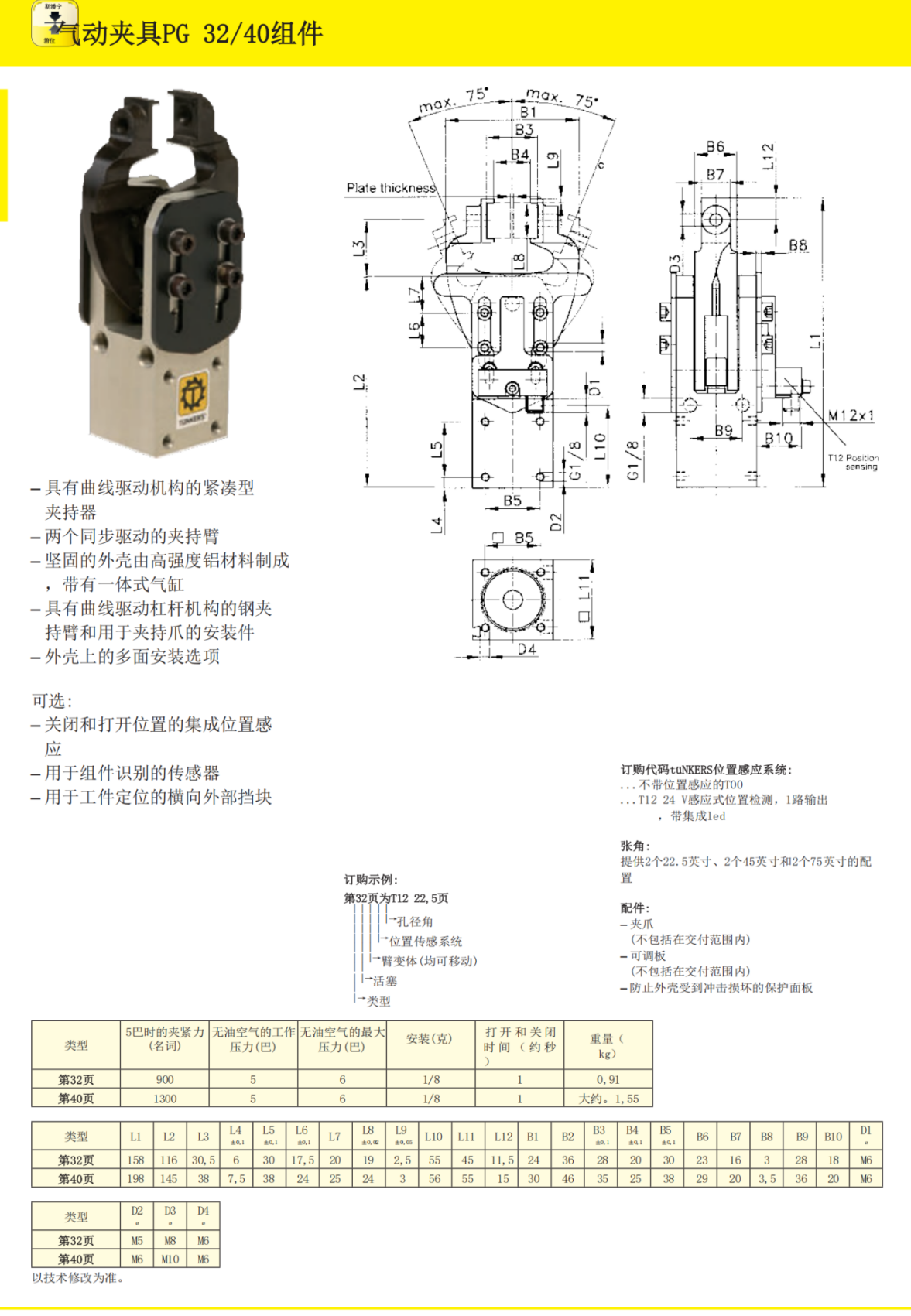
气爪是一种常见的夹紧装置,它的工作原理是利用气体的压力来夹
紧物体。气爪通常由气缸、气管、夹爪和控制系统等组成,通过控
制系统的指令,气缸内的气体被压缩,从而使夹爪收缩,夹紧物体。
气爪的工作原理可以分为两个步骤:夹紧和松开。在夹紧阶段,气
缸内的气体被压缩,从而使夹瓜收缩,夹紧物体。在松开阶段,气
缸内的气体被释放,夹爪松开,物体被释放。
气爪的夹紧力主要取决于气缸的压力和夹爪的设计。一般来说,气
缸的压力越大,夹紧力就越大。夹爪的设计也非常重要,不同形状
的夹爪可以适应不同形状的物体,并提供更好的夹紧力。
气爪的优点是夹紧速度快、夹紧力大、精度高、可靠性好、使用寿
命长等。它广泛应用于自动化生产线、机器人、数控机床等领域,
可以夹紧各种形状的物体,如圆形、方形、棱形等。
然而,气爪也存在一-些缺点。首先,气爪需要气源供应,如果气源
不稳定或中断,夹紧力就会受到影响。其次,气爪的夹紧力不易调
节,一旦夹紧力过大或过小,就需要更换夹爪或调整气缸压力。此
外,气爪的使用成本较高,需要购买气源设备和维护设备。
气爪是一种高效、、可靠的夹紧装置,其工作原理简单明了,
但也存在-些缺点。在实际应用中,需要根据具体情况选择合适的
气爪,并注意气源供应和夹紧力的调节。
EGT257
EGT289
KR60 UZ T12 A19.9 L4=26+4.5
V 50.1 BR3 A12 T12 90°CN
V 63.1 BR3 A41 T12N 135°CN
V 63.1 BR3 A41 T12N 135°CN的摇臂
V_40_BR2_A10_T00_90°
V_40_BR2_A10_T12-120
V_40_BR2_A10_T12-45
V_40_BR2_A10_T12-60
V_40_BR2_A10_T12-90
V2 40 BR2 A10 T12 120°
V2 40 BR2 A10 T12 90°
V2 50.1 BR3 A10 T12 90°
V2_40_BR2_A10_T12-45
V2-50.1-BR3-A40-T12-90
V263.1A10 T12 45°~105
V263.1A10 T12 45°~105°
V263.1ZA40 T12 45°~105°
V40 BR2 A10 T12 120带PNP传感器
V40 BR2 A10 T12 135
V40 BR2 A10 T12 135°
V40 BR2 A10 T12 90°
V40 BR2 T12 1301010007
V-50.1-BR3-A10-T12-105
V63 1 BR3 A10 T12 90°CN
V63.1 A11 T12 135°
V63.1 BR3 A12 T12 135°
V63.1 BR3 A91 T12 135°
V63.1 Z A10 T08T 60°
V63.1A10 T12 45°~135°
V63.1BR3
V63.1BR3含支架
V63.1Z A10 T12 120°
V63.1Z A11 T12 120°
V63.1Z A12 T12 120°
V63.1ZA40 T12 45°~135°
您是第33340019位访客
公司主营:德国SICK传感器,FESTO比例阀,德国FESTO电磁阀,ASCO电磁阀,NORGREN电磁阀,LEUZE传感器,CKD电磁阀,CKD气缸 沪ICP备09006758号-10
乾拓贸易是销售气缸,继电器的公司,以SMC气缸,PILZ继电器,FESTO气缸为主,产品型号规格齐全,报价合理,可满足不同客户的需求!
版权所有:上海乾拓贸易有限公司














